[School_ĐHMT] Hệ tọa độ thế giới thực, hệ tọa độ thiết bị, hệ tọa độ thiết bị chuẩn
[School_ĐHMT] Hệ tọa độ thế giới thực, hệ tọa độ thiết bị, hệ tọa độ thiết bị chuẩn Tháng Mười Hai 6, 2013 nguyenvanquan7826 School Đồ họa máy tính 1 response 1. Hệ tọa độ thế giới thực (WCS: World Coordinate System) Nội ...
[School_ĐHMT] Hệ tọa độ thế giới thực, hệ tọa độ thiết bị, hệ tọa độ thiết bị chuẩn
1. Hệ tọa độ thế giới thực (WCS: World Coordinate System)
Nội dung
Hệ tọa độ thế giới thực
Hệ tọa độ thiết bị
Hệ tọa độ chuẩn
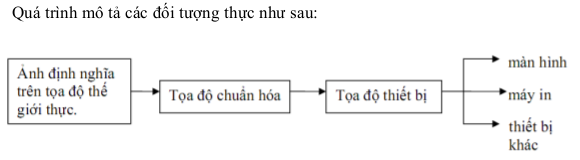
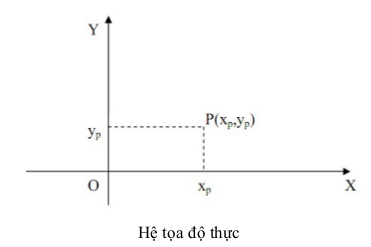
– Hệ tọa độ thế giới thực là hệ tọa độ mô tả các đối tượng trong thế giới thực
– Hệ tọa độ thực phổ biến là hệ tọa độ Descartes. Các điểm trong mặt phẳng được biểu diễn bởi tọa độ (x, y) với x, y thuộc R, gốc tọa độ là điểm O(0, 0), Ox và Oy là trục hoành và trục tung, x và y là hoành độ và tung độ.
– Các hệ tọa độ thực cho phép sử dụng các kích thước tùy ý (cm, km, nm, …)
2. Hệ tọa độ thiết bị (DCS: Device Coordinate System)
– Hệ tọa độ thiết bị là hệ tọa độ để biểu diễn các đối tượng của từng thiết bị xuất cụ thể (máy in, màn hình, …).
– Các điểm được biểu diễn bởi cặp tọa độ (x, y) với x và y thuộc N. Các điểm trong tọa độ thực được biểu diễn liên tục còn trong tọa độ thiết bị được biểu diễn rời rạc vì chúng thuộc tập số nguyên.
– Giới hạn của tọa độ (x, y) phụ thuộc vào từng thiết bị cụ thể.
3. Hệ tọa độ thiết bị chuẩn (Normalized device coordinates)
– Do mỗi thiết bị có một hệ tọa độ riêng nên việc hình ảnh được hiển thị tốt ở mọi thiết bị là không thể, vì vậy người ta đưa ra hệ tọa độ thiết bị chuẩn đại diện chung cho tất cả các thiết bị mà hình ảnh hiển thị không bị phụ thuộc vào thiết bị nào cả.
– Trong hệ tọa độ chuẩn, cặp tọa độ (x, y) sẽ có giá trị trong đoạn [0, 1]. Do đó vùng không gian trong hệ tọa độ chuẩn có điểm trái dưới là (0, 0), phải trên là (1, 1).